Es funktioniert - aber wie gut funktioniert es?
Die erfolgreichen Erstflüge von anemoi haben vor allem zwei Dinge mit sich gebracht: Eine große Menge Motivation (es ist unglaublich erfrischend, wenn die Dinge nach vielen Monaten und hunderten Stunden Arbeit tatsächlich zu funktionieren beginnen!), und eine noch größere Menge an Daten zur Auswertung.
Natürlich wirft das Versprechen einer "Live-Windanzeige" berechtigte Fragen auf: Wie sehr "Live" ist die Anzeige wirklich? Wie genau ist sie, und unter welchen Bedingungen kann diese Schnelligkeit und Genauigkeit erreicht werden? Sind die Lage-Daten aus der Trägheitsplattform, die auch als künstlicher Horizont dargestellt werden, wirklich korrekt und frei von Drift?
Das große Problem an der Live-Windberechnung ist, dass niemand die Wahrheit kennt. Die theoretischen Berechnungen und Simulationsergebnisse können so solide sein wie sie wollen - die Wahrheit liegt in der Luft. Aber dort bleibt sie eben auch, denn kein Flugversuch der Welt kann präzise validieren, woher der Wind denn wirklich kam und wie stark er wirklich war.
Trotzdem möchte ich nicht einfach ohne Beweis behaupten, dass anemoi die Versprechungen halten kann. Es wäre nicht redlich, eine Windanzeige anzupreisen, deren Genauigkeit nur in der Theorie bewiesen wäre, ohne dies praktisch mit Daten zu untermauern. Doch zum Glück gibt es eine Referenz, auf die ich seit Jahren baue, und die schließlich auch die Inspiration für meinen eigenen Entwurf gegeben hat: Das AirGlide-Variometer, das als erstes für die Breite verfügbares Instrument eine Live-Windberechnung lieferte, die diesen Namen verdient. Ich habe inzwischen mehr als tausend Flugstunden mit diesem Instrument, die meisten davon im Gebirge, und habe gut einzuschätzen gelernt, wie verlässlich es ist. Daher habe ich keine Bedenken, es als Referenz zur Validierung meines eigenen Instrumentes zu verwenden.
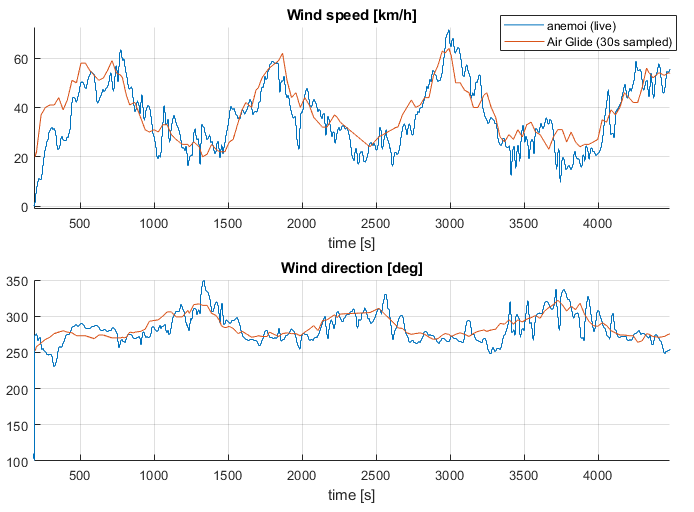
Die Daten beziehen sich wieder auf den Testflug vom 27. März, auf dem wir mehrmals zwischen dem starken Westwind im Flachland und dem schwachen Nordwestwind im Gebirge hin- und hergewechselt sind. Durch die signifikanten Änderungen im Windfeld, und auch durch den hohen Geradeausflug-Anteil über der Hanglinie, eignet sich dieser Flug hervorragend für eine Bewährungsprobe des Instruments. Da ich mir in der intensiven Vorbereitungsphase auf die Testflüge nicht die Zeit nehmen konnte, auch noch einen Logger für die im AirGlide berechneten Wind-Daten zu entwickeln, haben wir das Instrumentenbrett inklusive Windanzeige einfach mit einer Videokamera abgefilmt, und die am AirGlide angezeigten Winddaten dann alle 30 Sekunden aus dem Video abgeschrieben. Der so entstandene Zeitverlauf bildet zwar die kurzfristig gemessenen Details nicht ab, dient aber sehr gut als mittlerer Richtwert.
Das folgende Bild zeigt in blau den zeitlichen Verlauf von Live-Windstärke und -Richtung, wie sie das anemoi berechnet hat. Zum Vergleich sind die alle 30 Sekunden gesampelten AirGlide-Daten in rot aufgetragen.

Ein anderer wichtiger Aspekt der Ergebnisse ist etwas einfacher zu analysieren: Die Berechnung der 3D-Lage ("künstlicher Horizont"). Auch hier entfaltet der erweiterte Kalmanfilter seine Stärken, indem er die Druck- und GPS-Messungen verwendet um die Integrationsdrift der im Instrument verbauten Trägheitsplattform (IMU) zu entfernen. Würde man die Trägheitsmessungen "roh" verwenden, um die Lage zu berechnen, hätte man mehrere Probleme: Die Beschleunigungen sind nicht eindeutig (wird eine vertikale Beschleunigung gemessen weil der Pilot hoch zieht, oder weil wir uns in einer Kurve befinden?), und die Drehraten ergeben nur dann die Lagewinkel, wenn man sie über die Zeit permanent aufaddiert ("integriert"). Dann aber werden nicht nur die Messungen, sondern auch deren Fehler addiert. Der Fehler wächst immer weiter, so dass bereits nach kurzer Zeit das Ergebnis nicht mehr viel mit der Realität zu tun hat. Als Beispiel, wie dies aussehen würde (und wie das anemoi diesen Effekt durch permanente Korrektur verhindert), ist im folgenden Diagramm der Rollwinkel während einer Phase, in der wir am Hang geachtert haben, dargestellt - in blau als unkorrigierte Rohdaten, und in rot das in Echtzeit korrigierte, driftfreie Ergebnis.

Zu guter Letzt kann ich noch verkünden, dass der Grafik-Treiber inzwischen ebenfalls fertig geworden ist, so dass ab jetzt kein Laptop im Cockpit mehr nötig ist, um Testflüge zu machen. Die aktuelle Gestaltung der beiden Haupt-Display-Seiten ist nun neu auf der Startseite zu sehen!